






- Stock: In Stock
- Product code: 00-00013723
- Shipping Weight: 35.00kg
Unitree G1 Edu Flagship A-U3: humanoid robot for education and research
The humanoid robot Unitree G1 in the Edu Flagship A-U3 modification is a precision anthropomorphic platform designed for deterministic task execution in the field of high-level mechatronics and synthetic intelligence. Unlike entry-level iterations, the A-U3 version is based on an open architecture, providing direct access to low-level control through specialized SDKs and full native support for the ROS (Robot Operating System).
The computational core of the system is represented by a powerful 8-core processor, whose performance is sufficient to implement the most complex algorithms of dynamic stabilization and processing of dense sensor streams in real time. Without introducing critical delays into the control loops.
Kinematic scheme and electromechanical drives
The robot has a record density of degrees of freedom (DoF) for its class – the total number of active axes reaches 43. The distribution of movable joints is designed to achieve maximum biomechanical identity:
- Lower limbs: 12 active degrees of freedom (6 per leg), reinforced in the hip and knee areas.
- Torso and lumbar region: presence of an active joint in the waist area to ensure complex coordination of the center of mass.
- Manipulators: 14 degrees of freedom (7 per arm, including the hand), allowing for complex trajectory tasks in redundant coordinate space.
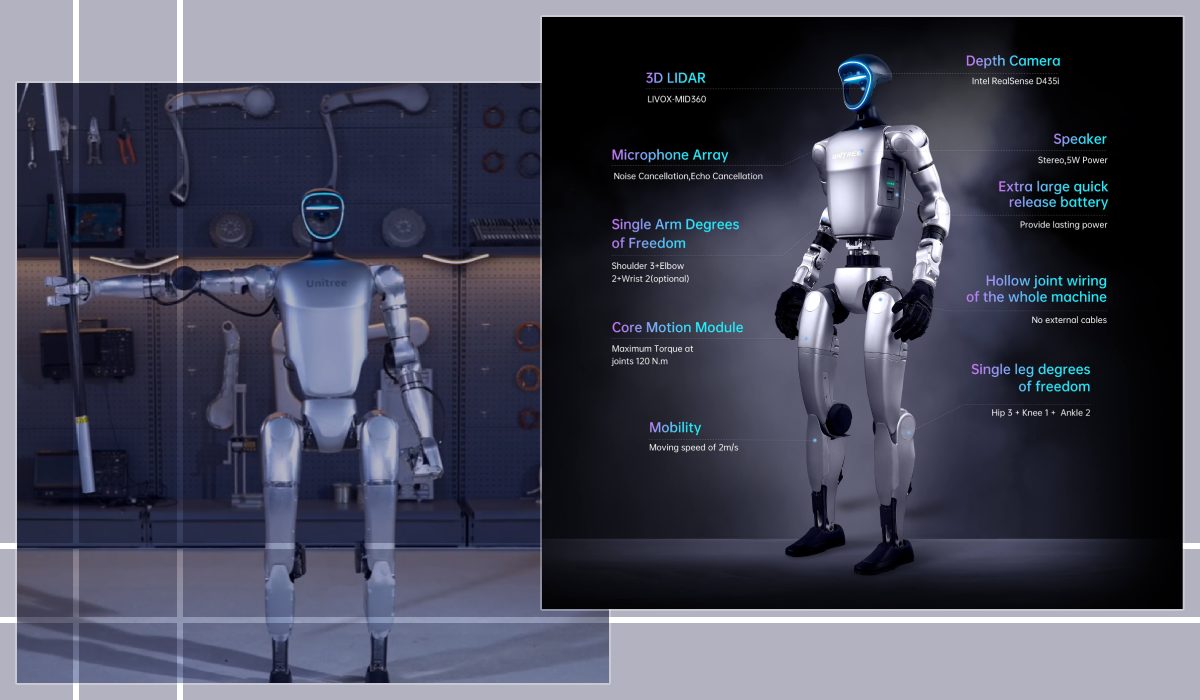
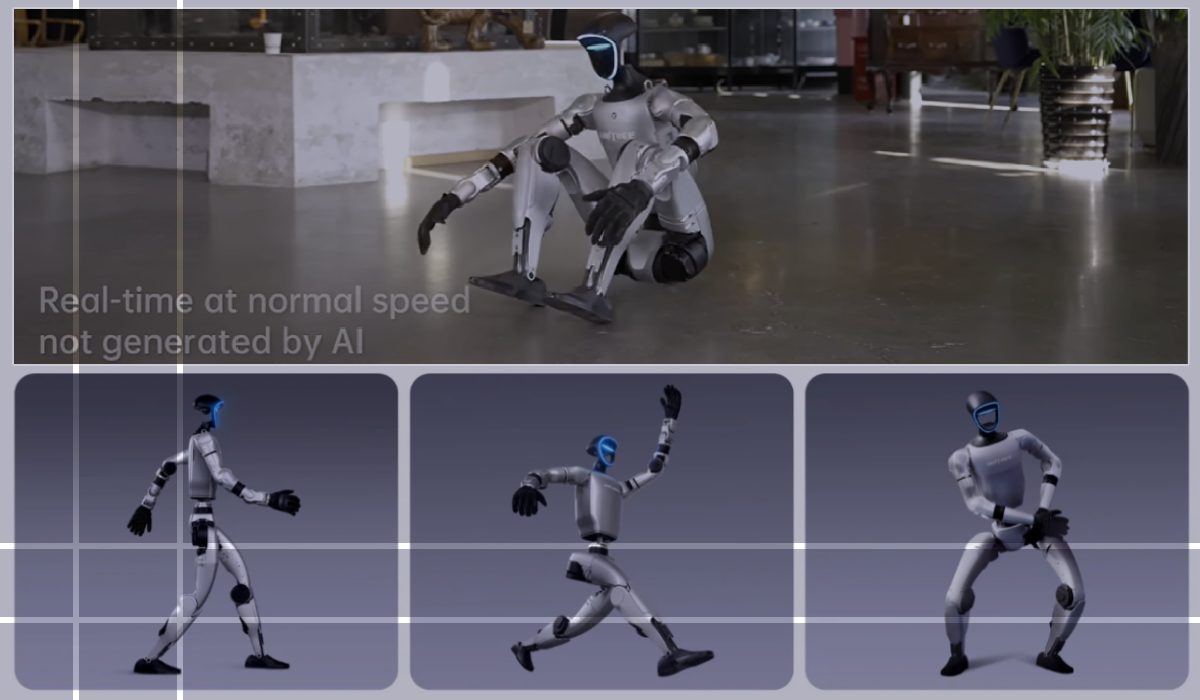
The power part is based on industrial synchronous motors with permanent magnets (PMSM). Critically important nodes, such as knee joints, are equipped with reducers providing a peak torque of up to 120 N·m. The kinematics of the legs with a total thigh and shin length of 0.6 m allows for amplitude movements, including knee bending in the range from 0° to 165° and complex rotations in the hip joint. The humanoid robot for education and research will amaze with its flexibility and plasticity!

Sensor complex and intelligent manipulators
The A-U3 version is equipped with specialized three-finger manipulators Dexterous (model Dex3-1). These grippers are designed to work with objects weighing up to 2 kg per limb, allowing for a wide working area with significant arm span.
The platform's informational awareness is ensured by the integration of a multimodal perception system:
- Solid-state 3D LiDAR: designed for high-precision SLAM mapping and navigation in unstructured environments.
- Depth Camera: used for object detection at close distances and providing visual feedback during manipulations.
- Acoustic array: a system of 4 microphones supporting sound source localization and a 5-watt speaker for implementing human-machine interaction interfaces.
Energy efficiency and operational capabilities
The robot's energy subsystem is built on a lithium-ion battery with a capacity of 9000 mAh (voltage 54V), guaranteeing up to 2 hours of continuous operation in active mode. Support for fast charging technology minimizes equipment downtime in research cycles.
The dimensional characteristics (height 1320 mm, weight about 35 kg) and the ability to compactly fold to dimensions of 690 × 450 × 300 mm make the G1 Edu Flagship A-U3 an optimal solution for laboratories with limited space. The implemented support for over-the-air software updates (OTA) ensures the constant relevance of system libraries and drive microcodes.
Technical specifications of Edu Flagship A-U3
| Model | Unitree G1 Edu Flagship A-U3 |
| Device type | Humanoid robot for educational and research purposes |
| Manufacturer | Unitree Robotics |
| Number of degrees of freedom | About 23 DOF (depending on configuration) |
| Drives | Proprietary high-performance servos from Unitree |
| Control type | Autonomous + remote control |
| Computing platform | High-performance embedded computer (AI-oriented module) |
| Operating system | Linux (Robot Operating System — ROS/ROS2) |
| Cameras | Stereo cameras / RGB-D camera (depending on configuration) |
| Sensors | IMU, depth cameras, position, force, and balance sensors |
| Navigation | Visual navigation and SLAM |
| Communication | Wi-Fi, Ethernet, Bluetooth |
| Software environment | Unitree SDK, support for Python/C++ |
| Functions | Walking, balancing, manipulation, research tasks |
| Purpose | Education, scientific research, AI and robotics algorithm development |
| Power supply | Replaceable battery |
| Operating time | Depends on usage scenario (usually up to 1–2 hours) |
| Body materials | Aluminum alloys and composite materials |
| Expansion interfaces | USB, GPIO, additional ports for sensors and modules |
Unitree G1 Edu: capabilities and programming
- Development and verification of neural network models for motion control and sensorimotor integration.
- Research in the field of autonomous navigation and modeling of human movements in laboratory projects.
- Prototyping of assistive systems and VR/AR interfaces with visually-human motor skills.
- Participation in high-level technology demonstrations and international robotics competitions (RoboCup, AI Hackathons).
Comparison table of key differences between A-U3 and B-U4
| Characteristic | Flagship A-U3 | Flagship B-U4 |
|---|---|---|
| Manipulators | 3-fingered, without sensors | 3-fingered, 33 tactile sensors per hand |
| AI platform | 8-core CPU | NVIDIA Jetson Orin (100 Tops) |
| Purpose | Demonstrations, tests, AI | Research, CV, deep AI learning |
Common features of both models: Both models have a height of 1320 mm, weigh about 35 kg, and are equipped with the same set of sensors (3D LiDAR + depth camera), communication modules (Wi-Fi 6, Bluetooth 5.2), and a 9000 mAh battery providing up to 2 hours of operation. Maximum torque in the knee joints for both robots. Having trouble deciding which robot to choose? Call us, our experts will help you select a humanoid for specific tasks.































