






- Доступність: В наявності
- Код товару: 00-00013723
- Вага в упаковці: 35.00kg
Unitree G1 Edu Flagship A-U3: робот гуманоїд для навчання та досліджень
Робот-гуманоїд Unitree G1 у модифікації Edu Flagship A-U3 становить собою прецизійну антропоморфну платформу, спроєктовану для детермінованого виконання завдань у галузі високорівневої мехатроніки та синтетичного інтелекту. На відміну від ітерацій початкового рівня, версія A-U3 базується на відкритій архітектурі, що забезпечує прямий доступ до низькорівневого управління через спеціалізовані SDK та повну нативну підтримку операційної системи ROS (Robot Operating System).
Обчислювальне ядро системи представлено потужним 8-ядерним процесором, продуктивності якого достатньо для реалізації найскладніших алгоритмів динамічної стабілізації та обробки щільних сенсорних потоків у реальному часі без внесення критичних затримок у контури управління.
Кінематична схема та електромеханічні приводи
Робот має рекордну для свого класу щільність ступенів свободи (DoF) – загальна кількість активних осей досягає 43. Розподіл рухомих з'єднань спроєктовано для досягнення максимальної біомеханічної ідентичності:
- Нижні кінцівки: 12 активних ступенів свободи (по 6 на кожну ногу), посилених в області тазостегнового вузла та коліна.
- Торс та поперековий відділ: наявність активного з'єднання в області талії для забезпечення складної координації центру мас.
- Маніпулятори: 14 ступенів свободи (по 7 на кожну руку, включаючи кисть), що дозволяє реалізовувати складні траєкторні завдання в надлишковому просторі координат.
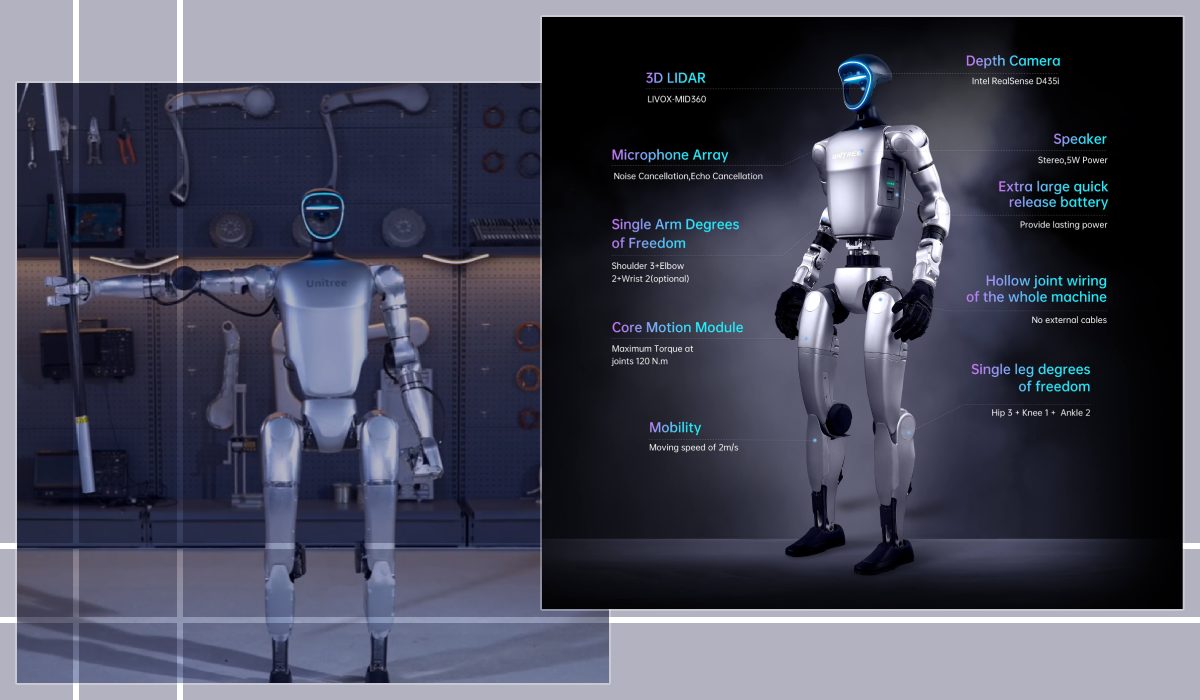
Силова частина базується на промислових синхронних двигунах з постійними магнітами (PMSM). Критично важливі вузли, такі як колінні суглоби, оснащені редукторами, що забезпечують піковий крутний момент до 120 Н·м. Кінематика ніг із сумарною довжиною стегна та гомілки 0.6 м дозволяє здійснювати амплітудні рухи, включаючи згинання коліна в діапазоні від 0° до 165° та складні обертання в тазостегновому суглобі. Робот гуманоїд для навчання та досліджень здивує своєю гнучкістю та пластикою!

Сенсорний комплекс та інтелектуальні маніпулятори
Версія A-U3 укомплектована спеціалізованими трьохпальцевими маніпуляторами Dexterous (модель Dex3-1). Дані захоплення спроєктовані для роботи з об'єктами вагою до 2 кг на кожну кінцівку, що при значному розмаху рук дозволяє охоплювати широку робочу зону.
Інформаційна обізнаність платформи забезпечується інтеграцією мультимодальної системи сприйняття:
- Твердотілий 3D LiDAR: призначений для високоточного SLAM-картування та навігації в неструктурованих середовищах.
- Depth Camera (Камера глибини): використовується для детекції об'єктів на ближніх дистанціях та забезпечення візуального зворотного зв'язку при маніпуляціях.
- Акустичний масив: система з 4 мікрофонів із підтримкою локалізації джерела звуку та 5-ватний динамік для реалізації інтерфейсів людино-машинної взаємодії.
Енергоефективність та експлуатаційні можливості
Енергетична підсистема робота побудована на літій-іонному акумуляторі місткістю 9000 мА·год (напруга 54V), що гарантує до 2 годин безперервної експлуатації в активному режимі. Підтримка технології швидкої зарядки мінімізує простої обладнання в дослідницьких циклах.
Габаритні характеристики (висота 1320 мм, маса близько 35 кг) та можливість компактного складання до розмірів 690 × 450 × 300 мм роблять G1 Edu Flagship A-U3 оптимальним рішенням для лабораторій з обмеженим простором. Реалізована підтримка оновлень програмного забезпечення «по повітрю» (OTA) забезпечує постійну актуальність системних бібліотек та мікрокодів приводів.
Технічні характеристики Edu Flagship A-U3
| Модель | Unitree G1 Edu Flagship A-U3 |
| Тип пристрою | Гуманоїдний робот освітнього та дослідницького призначення |
| Виробник | Unitree Robotics |
| Кількість ступенів свободи | Близько 23 DOF (залежно від конфігурації) |
| Приводи | Власні високопродуктивні сервоприводи Unitree |
| Тип управління | Автономне + дистанційне управління |
| Обчислювальна платформа | Високопродуктивний вбудований комп'ютер (AI-орієнтований модуль) |
| Операційна система | Linux (Robot Operating System — ROS/ROS2) |
| Камери | Стереокамери / RGB-D камера (залежно від комплектації) |
| Датчики | IMU, камери глибини, датчики положення, сили та балансу |
| Навігація | Візуальна навігація та SLAM |
| Зв'язок | Wi-Fi, Ethernet, Bluetooth |
| Програмне середовище | SDK Unitree, підтримка Python/C++ |
| Функції | Ходьба, балансування, маніпуляції, дослідницькі завдання |
| Призначення | Освіта, наукові дослідження, розробка алгоритмів ІІ та робототехніки |
| Живлення | Змінний акумулятор |
| Час роботи | Залежить від сценарію використання (зазвичай до 1–2 годин) |
| Матеріали корпусу | Алюмінієві сплави та композитні матеріали |
| Інтерфейси розширення | USB, GPIO, додаткові порти для датчиків та модулів |
Unitree G1 Edu: можливості та програмування
- Розробка та верифікація нейромережевих моделей управління рухом та сенсомоторної інтеграції.
- Дослідження в галузі автономної навігації та моделювання рухів людини в лабораторних проєктах.
- Прототипування асистивних систем та VR/AR-інтерфейсів з візуально-людською моторикою.
- Участь у високорівневих технологічних демонстраціях та міжнародних змаганнях з робототехніки (RoboCup, AI Hackathons).
Порівняльна таблиця ключових відмінностей A-U3 та B-U4
| Характеристика | Flagship A-U3 | Flagship B-U4 |
|---|---|---|
| Маніпулятори | 3-пальцеві, без сенсорів | 3-пальцеві, 33 тактильних сенсори на руку |
| AI-платформа | 8-ядерний CPU | NVIDIA Jetson Orin (100 Tops) |
| Призначення | Демонстрації, тести, ШІ | Дослідження, CV, глибоке навчання ІІ |
Загальні риси обох моделей: Обидві моделі мають висоту 1320 мм, вагу близько 35 кг та оснащені однаковим набором сенсорів (3D LiDAR + камера глибини), модулями зв'язку (Wi-Fi 6, Bluetooth 5.2) та акумулятором на 9000 мА·год, що забезпечує до 2 годин роботи. Максимальний крутний момент у колінних суглобах в обох роботів. Важко визначитися з вибором робота? Телефонуйте, наші експерти допоможуть підібрати гуманоїда для конкретних завдань.































